
Of players and helpers
Arguably, no one would challenge the notion that robots only exist because Homo sapiens, by nature, loves entertainment and has an aversion to work. Or, to put it in a more positive light: strives to maximize efficiency. We can find relevant proof points even in mythology, for instance, in the myths of ancient Greece, where Hephaestus, the god of blacksmiths, is said to have built automatons and watchmen to help him in his workshop. Vulcan, the Roman god of fire, even purportedly crafted slave girls from gold. Jewish literature includes tales of the golem, a giant brought to life by means of clay and gematria that serves and protects its creator without the ability to act autonomously or speak.
So, the urge of humans to create an artificial likeness of themselves for the purpose of performing useful work is astonishingly old, albeit the first true automatons fell short of being universally usable helpers. Yan Chi’s singing and dancing doll of wood and leather in the 10th century before Christ is deemed to be the first known mechanically operating figure resembling a humanoid. According to contemporaneous writings, it must have appeared very realistic: “The king stared at the figure in amazement. It walked at a fast pace while moving its head up and down, so that anyone would have thought it to be a living human being.”
Aristotle (384–322 BC), as always, was far more forward-thinking, believing that automatons could put an end to slavery: “There is only one condition in which we can imagine managers not needing subordinates, and masters not needing slaves. This condition would be that each (inanimate) instrument could do its own work.”
In the 3rd century before Christ, Philon of Byzantium also took at least a small step in this direction with his “automatic servant.” Controlled by pressure, a vacuum and change in weight, this mechanical lady was able to serve a mixed drink of wine and water. According to various sources, Heron of Alexandria in AD 60 supposedly created the first programmable robot. The engineer and author of numerous works on innovation such as Pneumatica and Automata designs a cart powered by a sand motor to entertain audiences at amphitheaters. The driverless vehicle was able to change directions and move along a pre-programmed course. This primitive mechanism bears great resemblance to a modern binary computer language; old-fashioned punch cards worked according to exactly the same principle. Another mechanical party piece is the fully automated play originated by Philon of Byzantium and refined by Heron. Amazingly, the performance of the ancient, binarily controlled animation was nearly ten minutes in length.
Truly early robotics, though, can only be found in the works of the Arabian engineer al-Dschazarī, who designed humanoid and programmable automatons in the 12th century. Leonardo da Vinci may have been inspired by this early Homo sapiens 2.0: In his drawing of a robotic knight, he created the first historically documented humanoid. Theoretically, it could have executed various movements such as moving its jaws, straightening up its spine and beckoning. Da Vinci’s anatomical studies of the human body were probably of help in this project.
Robotics timeline

1000 BC
Let someone else do the job ... an idea captured in many ancient tales and mythologies in the form of artificial creatures lending a helping hand to the gods – like robots are to humans today. Here is shown a picture of a golem, a giant with its origins in Jewish mythology that’s supposed to serve and protect its creator with humongous abilities and power.
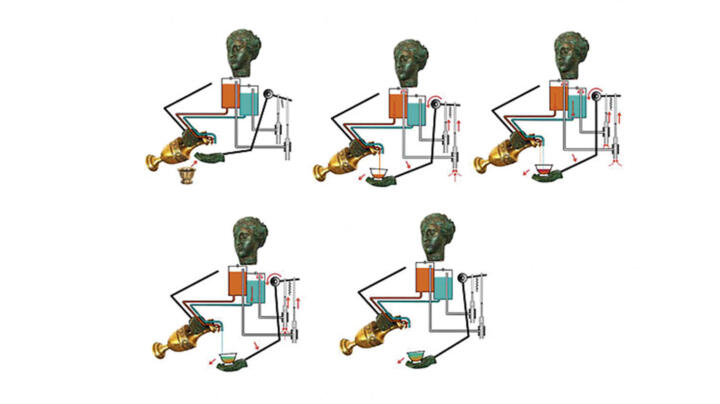
3rd century BC
The “automatic servant” created by Philon of Byzantium was able to serve a mixed drink of wine and water simply when a cup was placed into her free hand. The cup’s weight would activate the mechanism. When the cup was full, the process – again controlled by weight – would automatically stop.
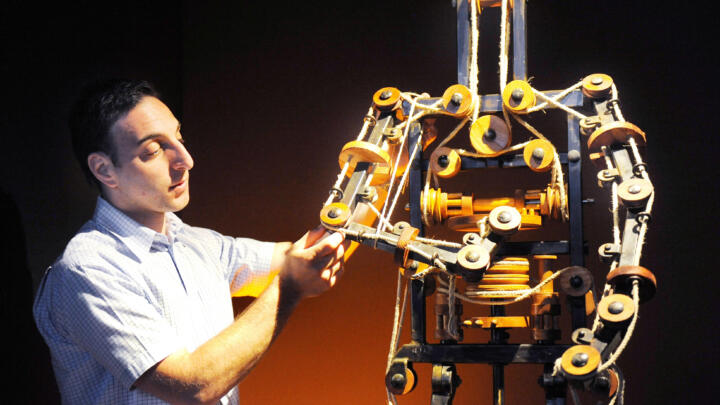
Um 1500
The universal genius Leonardo da Vinci (1452–1519) designed dozens of automatically operating machines including a robotic knight. These sketches are regarded as the first historic documentation of a humanoid. In 2002, NASA robotics expert Mark Rosheim brought da Vinci’s design to life using drawings and materials from those days. This model (pictured) has been exhibited on numerous occasions.
1740
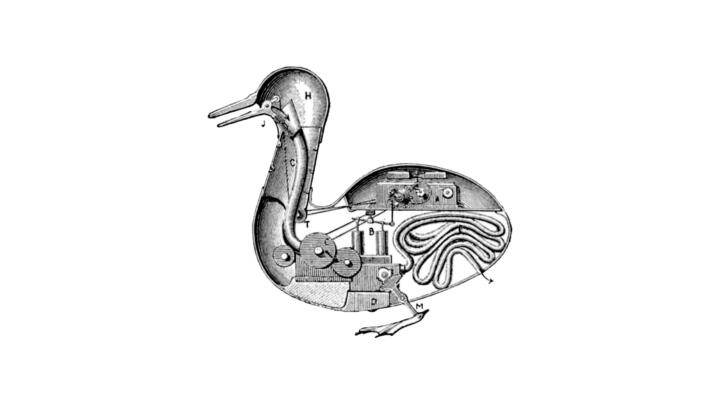
Jacques de Vaucanson (1709–1782) was a French engineer who dreamed of creating an artificial human that would function as accurately as possible. It was to remain a dream. At least his mechanical flute player performed a repertoire of twelve songs using a mechanical pin roller moving in two directions. Even truer-to-life was Vaucanson’s mechanical duck with more than 400 movable parts. In the end, tough, it was just a gimmick, too. The first fully automatic loom the Frenchman presented in 1745 was clearly more of a breakthrough achievement.

1810
The trumpeter created by the Dresden instrument maker Friedrich Kaufmann (1785–1865) is deemed to be the first real humanoid robot and was even a step ahead of human trumpeters: the machine was able to produce dyads of the same intensity and high purity or, as a contemporary of Kaufmann wrote, “of truly heavenly harmony.”

1948
In the robots Elmer and Elsie created by William Gray Walter (1910–1977), light- and touch-sensitive sensors, like nerve cells, controlled a motor. This enabled the tortoise-like machines to actually find their way around obstacles and therefore they’re regarded as the first electronic autonomous robots.

2014
In the summer of 2014, the Japanese company Softbank presented Pepper which, according to the company, was the world’s first social humanoid robot able to recognize faces and basic human emotions. Today, far more than 10,000 of the beady-eyed humanoids are in use worldwide. The interactive helpers are well on their way toward becoming a mass product.

2025
In a report, Bank of America estimates that the number of humanoid robots will reach one million by 2030 and three billion by 2060. Motion Technology Company Schaeffler is also consistently expanding its involvement in the field of humanoid robots and has established a forward-looking technology partnership with Neura Robotics, a high-tech company in the field of cognitive robotics. In addition to development, the collaboration also includes the supply of key components for humanoid robots, such as innovative actuators. Schaeffler will also use Neura humanoids in its global production network and integrate a mid-four-digit number of humanoids into its production by 2035.
Frankenstein’s forebear
When it comes to creating artificial humans, the alchemists make their mark in those days, too. For example, in 1538, the Swiss naturalist Paracelsus describes his creation of a “homunculus”: with horse manure and male semen, which should be heated in a vessel “for 40 days or for as long as it takes for it to come alive and start moving …” Good nourishment provided, “it will evolve into a rather lively human child with all its limbs …” A forebear of Frankenstein’s monster – even though it wasn’t until 1888 that this creature began giving readers the creeps.
Less frightening but all the more realistic was the creation of the robotic duck by the master toymaker Jacques de Vaucanson in 1740. It was able to flap its wings, quack, drink water and eat kernels of grain which it was even able to excrete again via a rubber bowel. A soldier with a trumpet produced by Friedrich Kaufmann in Dresden in 1810 is regarded as the first real humanoid robot of a modern design. Its value, too, was rather of an entertaining than a useful kind. The same applies to the Japanese compressed-air humanoid Gakutensoku (1927) or the aluminum man Eric (1928) that was set in motion and remote-controlled by electric motors and magnets. In 1939, Elektro came into the world. The behemoth (2.1 meters (7 feet) tall and weighing 120 kilos (265 pounds)) was even able to speak – 700 words that came from a record player.
All of these machines were no doubt mechanical masterpieces of their time, albeit as distant from the many stories about the idea of a “smart machine” that kept emerging over the centuries as Wolfgang von Kempelen’s Automaton Chess Player in 1783 – there was no artificial intelligence at work inside Kempelens miraculous machine, but a small human being.
From tortoises to piece-workers
Robotics did not experience a rapid rise until after the Second World War – boosted on the one hand by Konrad Zuse’s first computer in 1938 and by the invention of the transistor in 1947 on the other. The first electronic autonomous robots with complex behaviors were built by William Gray Walter in 1948. However, his creatures, Elmer and Elsie, were so slow that they were nicknamed “tortoises.”
Today’s articulated robots typically used in industrial environments are all based on inventions by George Devol and Joseph Engelberger. In 1954, they developed and built Unimate, the first electronic industrial robot. According to Engelberger, servo mechanisms, binary logic and solid-state physics were the most important tools for the development of robots after the Second World War. By the way, in 1961, Unimate – as the first industrial robot worldwide – ended up in manufacturing at GM’s Trent plant for lifting and stacking hot metal parts from a die-casting machine.
From then on, robotics really picked up momentum: The first hydraulically actuated robots appeared in 1960. The Stanford Research Institute got the first autonomously mobile robot, Shakey, off the ground in 1970. Shakey was even able to independently navigate by means of image processing. In 1973, Japanese research scientists at Waeda University in Tokyo started developing their humanoid robot Wabot 1. German robotics pioneer KUKA built Famulus, the world’s first industrial robot with six electromechanically driven axes. In 1974, the Swedish company Asea presented the first fully electric robot, IRb6 – the first to be programmed using a microcomputer. In 1984, Wabot 2 delivered an impressive performance – thanks to ten fingers and two feet the robot was able to play an organ, read music and accompany a person.
Automaker Honda began to dedicate itself to robotics engineering in 1986, with its research, in 2004, culminating in the humanoid robot Asimo, the first ever to copy the human gait. Japan loves humanoids anyway. In 2014, the “emotional robot” Pepper hit the market and has since been sold more than 10,000 times. In Japan, it has long become common practice for electromechanical copies to greet and serve real humans in hospitals and hotels. Humanoid robots have become established in healthcare settings as well and other countries are following the Japanese trend. Around the globe, humanoids are getting in close touch with humans – and making huge development strides also on an emotional level.
Robots producing themselves
A decisive threshold in robotics evolution has been reached when the machines begin to develop and build themselves, and they’ve already embarked on this path. As early as in 2006, Cornell University unveiled its Starfish, a four-legged robot that was able to model itself and taught itself how to walk again after having been damaged. Growing intelligence accelerates such developments, which many people perceive as dystopian. Areas such as robotics law and robotics ethics are gaining traction in this context.
It’s high time to deal with such issues because even at this juncture our world has become unthinkable without robots. In addition to industrial robots, millions of service robots are added year after year to mow lawns, vacuum-clean floors, care for the elderly, and so on. In 2016, the robotic bricklayer Hadrian X even built an entire one-family home in two days. Brick upon brick, taking cues from Aristotle: “… that each (inanimate) instrument could do its own work.”
Research scientists, by the way, are pursuing the playful goal of developing a soccer team of autonomous two-legged robots by 2050 that could be pitted against the World Soccer Champion. A more substantial project is the perfection of the human body, for instance by mechanical parts or high-resolution sensors, with the objectives of walking faster, jumping higher or seeing better. This culminates in ideas of the robotically extended human body as a posthuman being that might be able to colonize the universe. Even visionary Aristotle didn’t think that far ahead.


